
Moteurs À Double Vitesse
Dans les moteurs à induction, les moteurs qui peuvent obtenir deux ou plusieurs puissances et vitesses à partir d'une seule taille de structure sont appelés "moteurs à plusieurs vitesses". Les moteurs à deux temps sont généralement fabriqués en deux puissances et cycles différents obtenus à partir d'un seul enroulement placé sur le stator ou de deux enroulements séparés.
Ces moteurs sont divisés en deux en fonction de la forme de l'enroulement;
1. Moteurs liés Dahlander :
Il s'agit de moteurs qui peuvent obtenir deux révolutions différentes dans un rapport de seulement 1:2 à partir d'un seul enroulement placé sur le stator. Les moteurs à 4/2 et 8/4 pôles figurant dans les pages des valeurs de fonctionnement sont des moteurs à enroulement dahlander.
2. Deux moteurs à enroulement séparé :
Il est constitué de 2 enroulements séparés pour 2 circuits différents placés sur le stator. Cette conception est généralement utilisée lorsque les rapports de pôles sont inappropriés. Les moteurs 6/4 pôles figurant dans les pages de valeurs de fonctionnement sont des moteurs à deux enroulements séparés.
Veuillez consulter pour la fabrication de moteurs à 3 ou 4 vitesses qui peuvent être obtenus en utilisant les deux conceptions de bobinage ensemble.
Conception de moteurs à deux temps
Les moteurs à deux temps sont généralement conçus pour deux applications différentes.
1.couple de charge constant (couple constant)

Les applications à couple constant sont des applications telles que les compresseurs, les machines-outils et les grues qui nécessitent un couple élevé au démarrage et un couple constant à faible vitesse. La puissance de sortie à basse vitesse des moteurs conçus pour ces applications est maintenue aussi élevée que possible pour répondre à l'exigence de couple élevé.
2. le couple de charge est proportionnel au carré de la vitesse (couple variable)
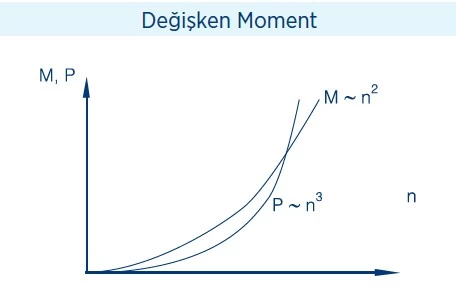
Les applications à couple variable sont des applications telles que les pompes et les ventilateurs, qui ne nécessitent pas un couple élevé au démarrage et dont le besoin en couple à faible vitesse diminue avec le carré de la vitesse. Dans les moteurs conçus pour ces applications, le rapport de puissance est d'environ 1:4 lorsque le rapport de rotation est de 1:2, et le rapport de puissance est d'environ 1:3 lorsque le rapport de rotation est de 3:2.
Dans les moteurs bobinés Dahlander, la connexion Δ/YY est faite pour un couple constant et la connexion Y/YY est faite pour un couple variable. La connexion Y/Y est réalisée dans les deux applications dans les moteurs avec deux enroulements séparés. Les connexions des extrémités des moteurs sont les suivantes ;

Cliquez ici afin de lire nos autres blogs contenant des informations sur les moteurs électriques.